
Commenti
Cyberlegs, "gambe bioniche" per le persone che hanno subìto un amputazione transfemorale
di Nicola Vitiello* e Francesco Giovacchini** (*Ricercatore, Istituto di BioRobotica della Scuola Superiore Sant'Anna di Pisa e coordinatore del progetto "Cyberlegs"; **Research Fellow, Istituto di BioRobotica della Scuola Superiore Sant'Anna di Pisa)
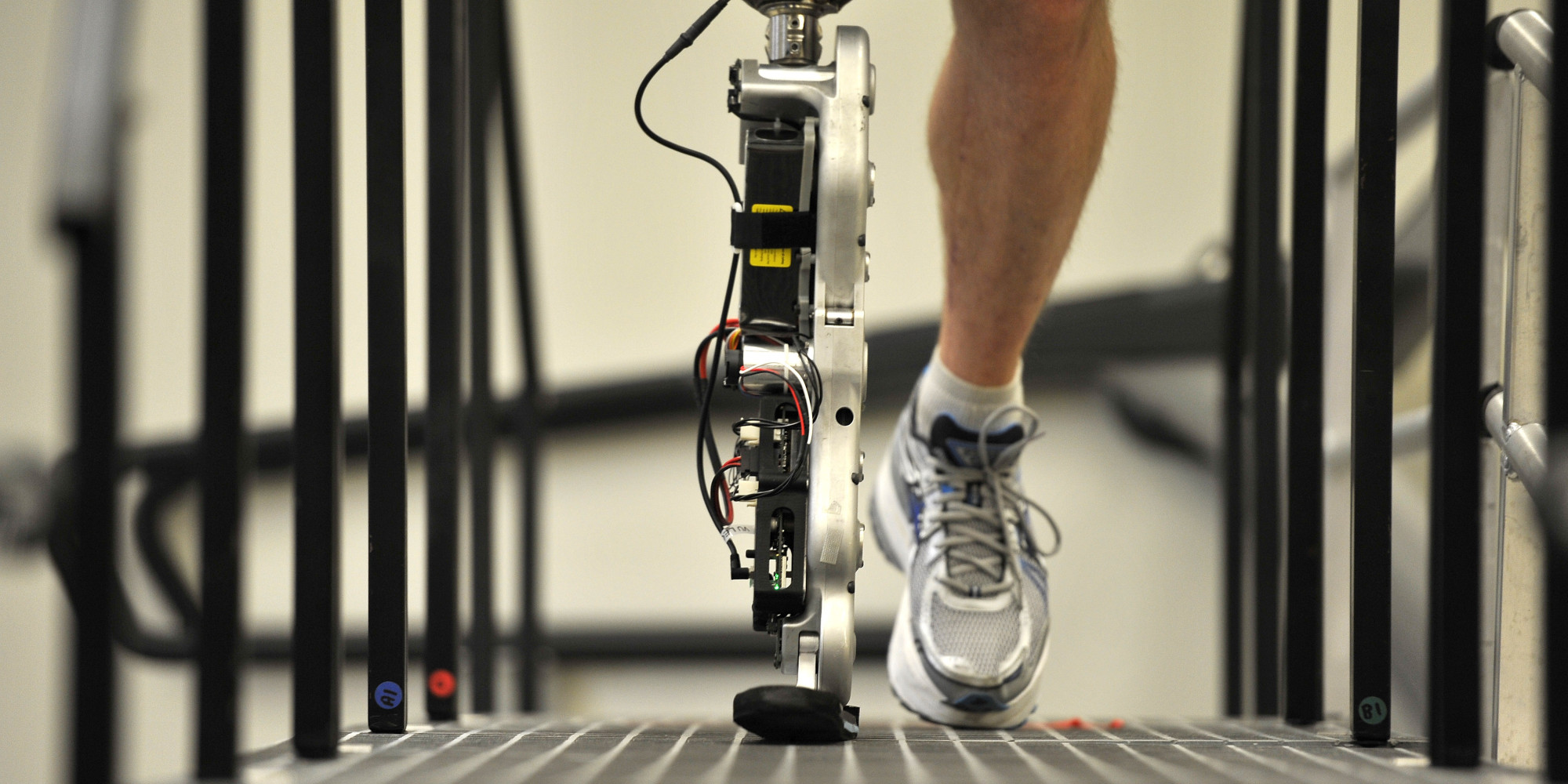
Cyberlegs, il rivoluzionario sistema di "gambe bioniche" per far tornare a camminare le persone che hanno subìto un amputazione transfemorale
30mila: questa è la stima delle persone che in Europa, ogni anno, subiscono un'amputazione transfemorale a causa di forme di diabete (quello di tipo mellito), di patologie del sistema vascolare periferico, di traumi o di tumori. Queste 30mila persone si trovano di fronte alla sfida di tornare a camminare nella condizione in cui l'intensità dello sforzo fisico e cognitivo si rivela più alta. L'amputazione transfemorale, infatti, è una condizione invalidante e può compromettere lo stato di salute di coloro che la subiscono.
Restituire un cammino più fisiologico a queste persone, ripristinandone il benessere psicofisico, è stata la sfida che ha affrontato il progetto europeo CyberIegs, iniziato nel 2012 e concluso a febbraio 2015. La risposta è consistita nello sviluppo di un nuovo sistema robotico, costituito da una protesi attiva, dotata quindi di ginocchio e di caviglia motorizzati, collegata a un'ortesi bilaterale di bacino, ovvero un sistema alimentato a batteria e indossabile come uno zaino, capace di fornire alle anche il surplus di energia, per rendere la camminata più efficiente, imprimendo ai movimenti maggiore regolarità e sicurezza. Assistere la camminata e non soltanto sostituire l'arto mancante è stata la filosofia che ha caratterizzato il progetto.
Sensori non invasivi indossabili e scarpe "intelligenti", in grado di monitorare in tempo reale la camminata, forniscono all'intelligenza del sistema Cyberlegs la capacità di intuire l'intenzione motoria della persona e inviare l'opportuno comando ai motori, grazie a schemi di controllo bio-ispirati, basati su quelle che vengono definite "primitive motorie". Il dispositivo non pone ostacoli alla capacità e all'intenzione motoria della persona amputata che lo indossa. L'assistenza viene prestata in modo fluido, soltanto se e quando risulta necessario.
Lo sviluppo del sistema è stato possibile grazie al lavoro di un consorzio formato da Université catholique de Louvain (Louvain la Neuve, Belgio), Vrije Universiteit Brussel (Brussel, Belgio), Univerza v Ljubljani, (Ljubljani, Slovenia), Fondazione Don Carlo Gnocchi (Firenze) e dall'Istituto di BioRobotica della Scuola Superiore Sant'Anna di Pisa che ha anche coordinato l'intero progetto. I risultati della sperimentazione, durante la quale 11 volontari hanno testato i dispositivi, sono promettenti e rendono chiara la prospettiva per il futuro: ingegnerizzare il sistema per ridurne ancora gli ingombri e il peso, migliorando così il comfort per la persona amputata è la nuova sfida che si apre.